引言
无刷电机因其高效率、低噪音和长寿命等优点,广泛应用于工业自动化、无人机、电动汽车等领域。在无刷电机的控制中,速度控制是一个关键问题。为了实现精确的速度控制,闭环控制技术被广泛应用。本文将探讨基于 PWM 信号和FG 信号的闭环控制方法。
1. 闭环控制解决的问题:
由于负载,电压等外在因素波动造成的速度不精准,或低速意外堵转。
对 NIDEC 隔膜泵而言,因隔膜泵的个体差异,以及输送介质的管路差异等原因,需要超低流量下的应用场合时,避免因低 PWM 占空比时电机输出扭矩减小,而发生的电机转速波动大、电机堵转保护、流量波动过大等问题。
闭环控制可以在电机堵转前及时发现异常低速,立刻干预 pwm,使电机及时加速,避免堵转,杜绝用户在低流量控制时留下的产品质量隐患。
2. 闭环实现方式:
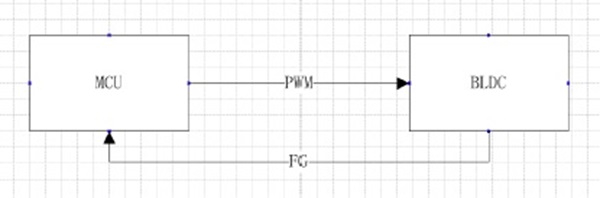
2.1 硬件准备
将电机pwm 信号与 fg 信号和mcu 的 IO 连接,如下图
2.2 软件控制算法
一般速度控制,只要简单判断 fg 频率,并实时调整pwm 即可,如下图:
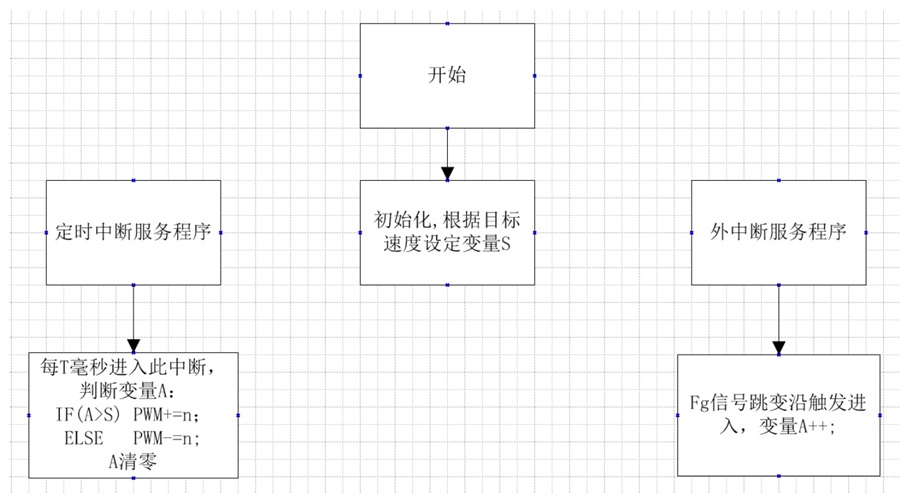
调整S 值与T 值,可改变最终速度。调整 n 值可调整闭环性能。
2.3 其他闭环控制方法
以上是最简单的闭环控制算法,其基本思想是根据 FG 信号的变化来调整PWM 信号的占空比。如遇速度精度要求更高,且 mcu 算力充裕的应用场合,亦可采用以下控制方法:
2.3.1 PID 算法:
PID 控制的优点是控制精度高,适用于大多数线性系统。然而,PID 参数的整定较为复杂,且对非线性系统的控制效果有限。
2.3.2 模糊控制算法:
模糊控制是一种基于模糊逻辑的控制方法,适用于非线性、不确定性和复杂的系统。
3. 结论
闭环控制在无刷电机速度控制中具有重要的应用价值。通过 PWM 信号和FG 信号的结合,可以实现对电机转速的精确控制。在实际应用中,应根据具体需求选择合适的控制算法,并通过实验调试优化控制参数,以实现最佳的控制效果。