Methods for Achieving Ultra-Low Flow in Ultrasonic Dental Scalers
Introduction
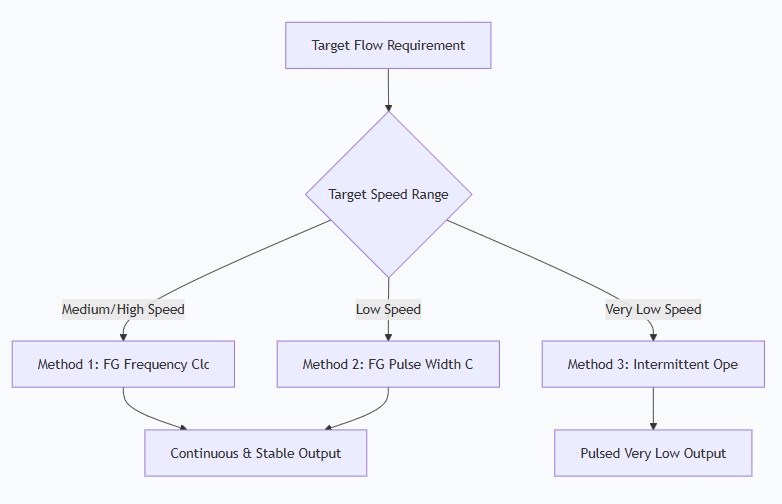
Ultrasonic dental scalers remove dental calculus and plaque through high-frequency vibrations, and the control of water flow directly affects the cleaning efficacy and patient comfort. With the diversification of clinical needs, scalers are required to provide continuously adjustable flow rates, ranging from high-speed irrigation to ultra-low drip irrigation under different operating conditions. However, brushless motors are prone to issues such as insufficient torque, significant speed fluctuations, and even stalling at ultra-low speeds. Drawing on the experience of closed-loop control in brushless motor speed regulation, this paper presents three distinct control strategies, tailored for medium-to-high speed, low speed, and ultra-low speed scenarios respectively, to achieve stable ultra-low flow output in ultrasonic dental scalers.
1. Medium-to-High Speed Scenario: Closed-Loop Control Based on FG Frequency
In the medium-to-high speed operating range, the motor speed is sufficiently high, providing stable feedback signals, making it suitable for traditional closed-loop control strategies.
Control Principle:
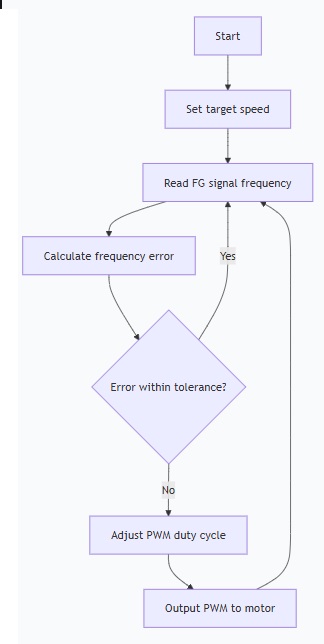
The motor outputs a number of FG (Frequency Generator) pulses per revolution. The MCU detects the frequency of the FG signal and compares it with the frequency corresponding to the target speed. It then adjusts the duty cycle of the PWM signal in real-time based on the error, causing the motor speed to quickly converge to the target value.
Applicable Conditions:
- Higher flow demand, such as during irrigation or cooling phases.
- The motor operates within a continuous, stable medium-to-high speed range.
- Load changes are not severe.
Advantages and Disadvantages:
- Advantages: Fast response, high control precision, simple implementation.
- Disadvantages: At extremely low speeds, the FG frequency becomes too low to be detected and responded to effectively.
Control Flowchart:
2. Low-Speed Scenario: Closed-Loop Control Based on FG Pulse Width
When lower flow rates are needed (e.g., gentle mode or pediatric scaling), the motor speed decreases, leading to a lower FG signal frequency where traditional frequency detection becomes slow to respond. In this case, the high or low level duration of the FG pulse can be used as the feedback variable.
Control Principle:
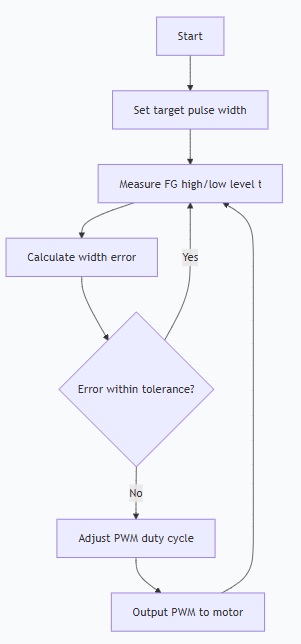
The MCU detects the duration of the high or low level of the FG pulse, which is inversely proportional to the motor speed. By comparing the actual level duration with the target duration, the PWM duty cycle is adjusted. Even at very low speeds, sufficient speed information can be obtained from the pulse width.
Applicable Conditions:
- Low flow demand, with the motor operating in a continuous low-speed rotation state.
- The motor remains in continuous operation, not yet near the stalling threshold.
Advantages and Disadvantages:
- Advantages: Enables closed-loop control even at low speeds, preventing speed fluctuations.
- Disadvantages: When speed decreases further, approaching the stalling threshold, the pulse width becomes extremely large, causing significant control response delays.
Control Flowchart:
3. Ultra-Low Speed Scenario: Intermittent Motion Open-Loop Control
When ultra-low flow is required (e.g., drip irrigation, medicated rinse), a brushless motor operating continuously is highly susceptible to stalling due to insufficient torque. At this point, continuous closed-loop control is abandoned in favor of an intermittent open-loop control strategy.
Control Principle:
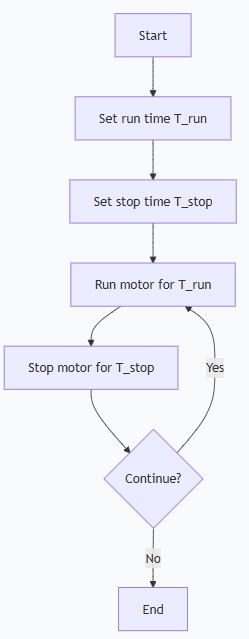
The motor runs at a reliably low speed (e.g., the minimum safe speed to avoid stalling) for a short period (e.g., 50ms), then stops for a period (e.g., 60ms), repeating this cycle. The average flow rate = (Run time / Cycle time) × Flow per pulse. Theoretically, the average flow velocity can be reduced infinitely by adjusting the duty cycle.
Applicable Conditions:
- Ultra-low flow demand, where intermittent flow fluctuation is acceptable.
- The motor cannot operate stably at continuous low speeds.
- The system is insensitive to instantaneous flow fluctuations (e.g., non-continuous jet).
Advantages and Disadvantages:
- Advantages: Simple and reliable, prevents stalling, enables very low average flow rates.
- Disadvantages: The output flow is pulsating, unsuitable for scenarios requiring a continuous, steady stream.
Control Flowchart:
4. Control Strategy Summary and Recommendations
| Control Method | Feedback Signal | Applicable Speed Range | Advantages | Disadvantages |
|---|---|---|---|---|
| FG Frequency Closed-Loop | FG Frequency | Medium-to-High Speed | Fast response, high precision | Difficult to detect at low speeds |
| FG Pulse Width Closed-Loop | FG Level Duration | Low Speed | Maintains control at low speeds | Significant delay at ultra-low speeds |
| Intermittent Open-Loop | No Feedback | Ultra-Low Speed | Prevents stall, enables ultra-low flow | Discontinuous flow output |
5. Conclusion
The wide-range flow control requirements of ultrasonic dental scalers necessitate the adoption of different control strategies across different speed intervals. FG frequency-based closed-loop control ensures responsiveness and precision at medium-to-high speeds. A switch to FG pulse width-based closed-loop control maintains stable operation at low speeds. For ultra-low speeds, intermittent open-loop control prevents stalling and achieves extremely low average flow rates. The organic combination of these three methods enables continuous and stable control of the scaler, from high-speed irrigation down to ultra-low drip irrigation, while ensuring system reliability. This enhances the clinical experience and therapeutic outcomes.