Price competition in the blood pressure monitor industry has reached a white-hot stage, characterized by intense internal competition, a polarized market, and razor-thin profit margins.

The fierce price war for finished blood pressure monitors has deeply extended to the upstream core component supply chain. The competition for diaphragm pumps used in these monitors is equally intense, exhibiting clear market stratification and price fragmentation.
Against this backdrop of industry-wide low-price competition, NIDEC's brushless DC diaphragm pump, which increases the lifespan by an order of magnitude (from "tens of thousands" to "hundreds of thousands" of cycles), has gained an excellent opportunity to redefine market segments and value propositions. The winning product will no longer be the absolute lowest-priced one, but rather one that builds new value barriers through technological innovation or service models, while guaranteeing accuracy.
For the average home user, who takes 1-2 measurements daily (amounting to only a few hundred cycles per year), a pump rated for 30,000-40,000 cycles is sufficient for decades of use—far exceeding the product's own technological refresh cycle. In this scenario, using an NIDEC brushless pump offers minimal perceived value increment to the user, representing typical "performance overkill," making it difficult to justify a significant price premium to consumers.
However, for hospital/clinic settings, the lifespan of a blood pressure monitor is a "rigid requirement" and a "marker of grade."
In a hospital, a single upper-arm monitor may be used dozens of times daily for various patients—tens or even hundreds of times more frequently than in home use. Here, lifespan is directly linked to:
- Device Availability & Maintenance Costs: A longer lifespan means less downtime due to failure, and lower frequency of repairs, replacements, and associated labor costs.
- Measurement Consistency & Reliability: Medical settings demand extremely high accuracy and stability of data. A pump with poor durability may experience decay in inflation/deflation speed and stability towards its end-of-life, potentially affecting measurement results.
- Product Grade & Procurement Decisions: For procurement departments (e.g., hospital equipment division), lifespan is a key hard metric for evaluating equipment quality and assessing "total cost of ownership." A long-life pump is a vital identity marker for high-end, professional-grade equipment.
In medical professional-grade blood pressure monitors, the reliability, precision, durability, and full lifecycle value of NIDEC brushless DC diaphragm pumps constitute a vital value foundation and premium differentiator for manufacturers.
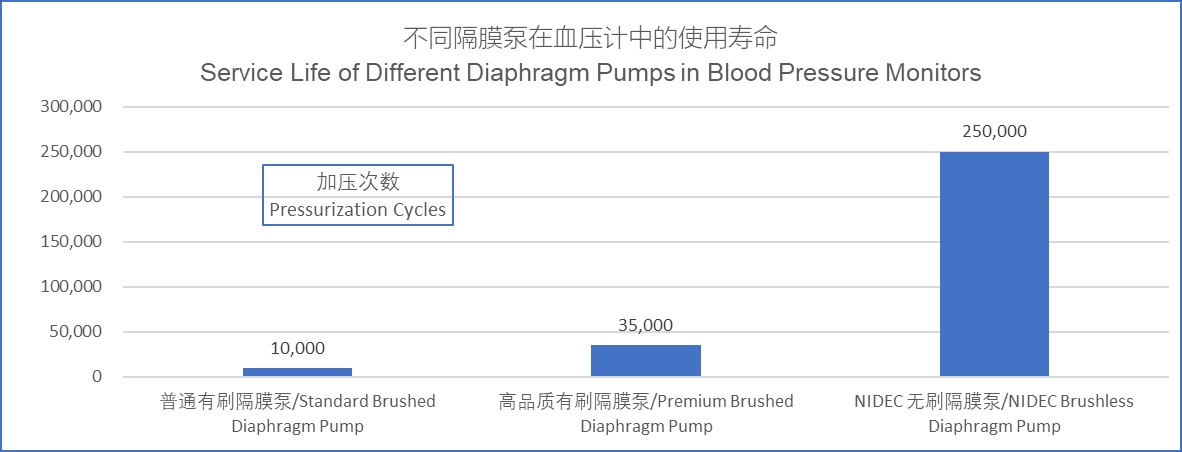
The chart below compares the pressurization cycle life of common brushed diaphragm pumps, high-quality brushed diaphragm pumps, and NIDEC brushless diaphragm pumps used in the blood pressure monitor industry:
- Common brushed diaphragm pumps (for home monitors): ~10,000 cycles
- High-quality brushed diaphragm pumps (for medical monitors): 30,000-40,000 cycles
- NIDEC brushless diaphragm pumps: 200,000-300,000 cycles
Although the unit cost of the NIDEC brushless pump is higher than that of common brushed pumps, this represents a crucial value investment. The extended lifespan, quiet operation, and superior reliability it delivers can be directly translated into core high-end selling points for the final product. This allows the finished monitor to achieve significant end-user price premiums and strongly reinforces its positioning as professional-grade and durable. The return on this investment is clear.
For detailed product information, please leave a message or contact us via email.